Dentro de alguns anos eles passarão a fazer parte de nossas vidas, realizando tarefas cotidianas como fazer compras ou cozinhar; Esta é a promessa de uma indústria que hoje está focada no desenvolvimento de robôs humanóides. Além de oferecer um robô mordomo para a casa, as inovações associadas a estas máquinas podem também pode ser usado em outros aprimoramentos para pessoas.
É o caso de um tecido criado por pesquisadores do Laboratório de Transdutores Suaves (LMTS) da Escola de Engenharia EPFL, na Suíça. “Embora os têxteis tenham servido tradicionalmente apenas como vestuário passivo, transição para tecidos que atuam como atuadores poderosos “Isso permite um novo tipo de robótica vestível que é confortável, discreta e prática para apoiar as atividades diárias”, diz Herbert Shi, diretor do LMTS.
Seu projeto visa atender a essa necessidade da indústria com este trabalho mais recente. Eles desenvolveram um atuador de tecido ou têxtil feito de fibras de memória ligadas (SMA). Testes publicados em Conquistas da ciência mostram que esta inovação pode ser aplicada tanto a robôs quanto a roupas. destinado a tratamento médico ou assistência desportiva.
Transição X
Os responsáveis por este projeto repensaram a forma de tecer finos fios metálicos (feitos de uma liga de níquel-titânio) dentro de um tecido flexível. O resultado é um tecido leve que pode levantar um quilograma com apenas 4,5 gramas de material.l, o que significa que pode levantar mais de 400 vezes a sua massa.
O desafio é combinar força com elasticidade e adaptabilidade numa variedade de peças de vestuário. Essa força é obtida apertando um pedaço de tecido ao meio.
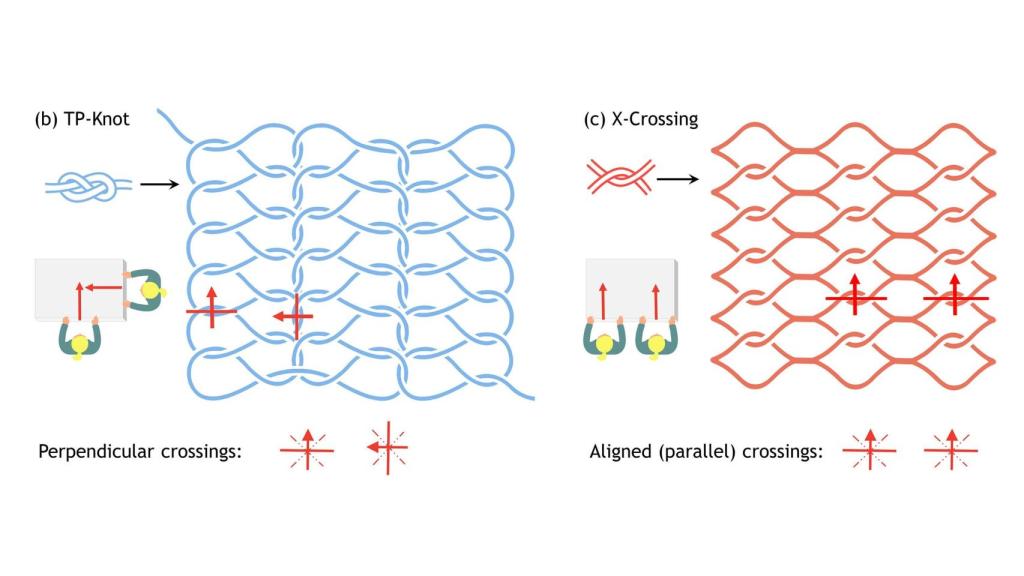
Em tecidos padrão de malha ou com nós, as fibras são tecidas em diferentes direções. Quando comprimidas, suas forças tendem a se atrair, anulando-se parcialmente, lembra a equipe de pesquisa.
Este efeito indesejável pode ser evitado costurando as fibras entrelaçadas em um padrão periódico denominado arquitetura X-Crossing. Então, Eles encurtam e endurecem quando aquecidos por corrente elétrica.
Design X em comparação com outros tipos de cadarços
Omicrono
A geometria da junta X, como pode ser vista nas fotos, consiste em pequenos diamantes entrelaçados. Cada interseção de fibra é precisamente alinhada na direção do movimento desejado.
“Percebemos que a orientação das interseções das fibras desempenha um papel crítico na quantidade de forças dentro do atuador têxtil”, explica Huapeng Zhang, estudante de graduação do LMTS e primeiro autor.
Eles explicam que o alinhamento das interseções garante que as forças geradas em cada interseção contribuam para o todo, em vez de se oporem, criando “um impulso têxtil que é significativamente superior aos designs anteriores de malha ou nós”.
Ao contrário da arquitetura tricotada, onde as fibras formam laços e cada par de interseções forma ângulos obtusos, ou no caso da arquitetura com nós, onde a direção de algumas interseções das fibras difere em um ângulo de aproximadamente 90°, A arquitetura de junção X garante que todas as conexões de fibra praticamente paralelo, de modo que a força gerada em cada junta coincida com o eixo de compressão.
levantamento de peso
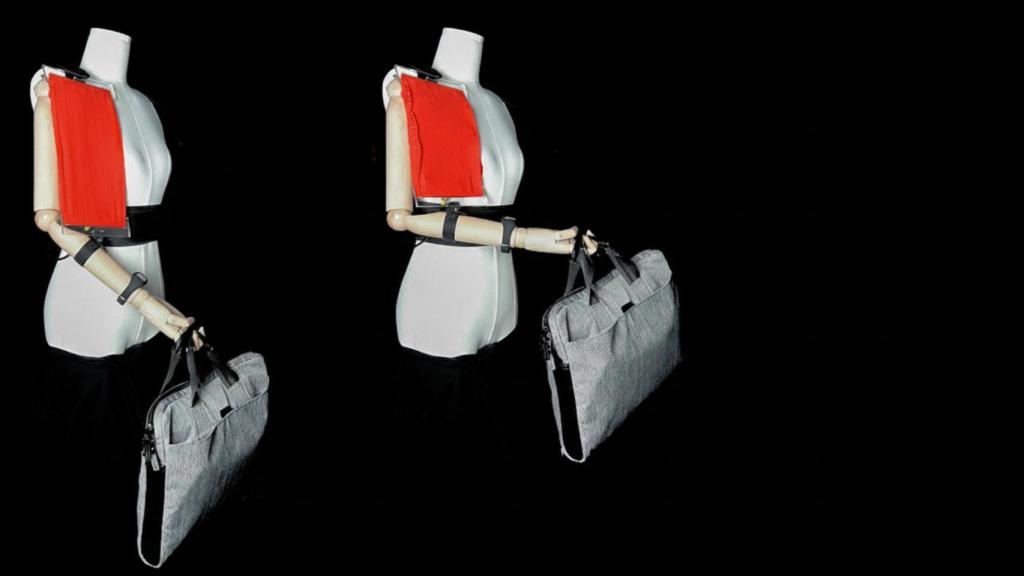
Para demonstrar o potencial deste novo tecido robótico, a equipe de pesquisa testou o atuador X-Crossing em dois protótipos funcionais e dois dispositivos vestíveis. O primeiro é preso ao braço do manequim como uma pulseira ou parte da manga de uma camisa. O atuador é usado para dobrar o manequim no cotovelo.
Neste teste, uma boneca com O atuador foi capaz de levantar um saco de quilogramas e com amplitude de movimento de 30 graus. O movimento foi suave e controlado.
Amostra de teste de braço robótico
Omicrono
A segunda demonstração utilizou o atuador em um teste de compressão corporal que poderia ser usado em mangas médicas ou equipamentos esportivos. A malha SMA X-Crossing foi envolta em tecido vermelho e enrolada em uma esponja macia.

Também foi postado termistor e sensor de pressão sob o atuador para medição simultânea de temperatura e pressão. Quando a energia foi fornecida a 50 e 16 W, a pressão aumentou para 12 e 8 kPa, respectivamente.
Após a remoção da energia, a pressão diminuiu e atingiu uma pressão residual de 5 e 3,6 kPa. Durante a operação, a temperatura externa do atuador selado foi mantida com segurança abaixo de 45°C.
Os pesquisadores dizem que esse tipo de impulso é uma forma promissora fornecer dispositivos de compressão vestíveis para terapia médica ou para uso aeroespacial, superando as limitações das vestimentas de compressão elástica passiva.
Invenções como esta, embora pareçam um grão de areia numa indústria tão grande, contribuem para a criação de máquinas cada vez mais capazes e semelhantes às humanas, e são fruto de futuros dispositivos médicos adaptados a cada paciente.